Моделирование сознания. Урок 2. У робота появляется сенсор.
Что бы смотреть урок полностью, подпишитесь на платный раздел.
В платном разделе статья находиться здесь.
На прошлом уроке мы создали примитивную модель робота в виртуальной вселенной. Но робот у нас получился "слепой". Он не видит окружающую его реальность. Поэтому сейчас мы придумаем какой-нибудь сенсор. Например, что то типа радара, как у летучей мыши. Для этого создадим класс Radar...
...
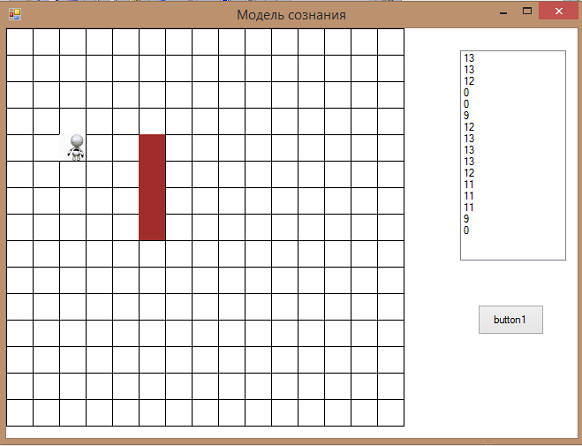
Добавим к главной форме список ListBox и соединим его с роботом:
|
space = new Space(15, 15); space.location_size = 30; space.objects.Add(new Wall(5, 4)); space.objects.Add(new Wall(5, 5)); space.objects.Add(new Wall(5, 6)); space.objects.Add(new Wall(5, 7)); robot = new Robot(2, 2, "robot.png",space); robot.list_box = lbRadar; space.objects.Add(robot);
body = new Body(robot); |
Теперь можно тестировать: