




| Моделирование сознания. Урок 12. Внутренняя модель. |

|

|
| Автор megabax | ||
| 21.06.2024 г. | ||
|
Моделирование сознания. Урок 12. Внутренняя модель. Исходники к уроку можно скачать в платном разделе. На прошлом уроке мы улучшили стратегии поиска пищи и избегания опасностей. Прежде чем идти дальше, подумаем, в каком направлении двигаться. Обратимся снова к труду Холк Круза и Мальта Шилинга "Психические состояния как эмерджентные (возникающие) свойства. От походки до сознания" (см. урок . Моделирование сознания. Урок 8. От походки до сознания).... ... ...Давайте подумаем. Как хранит информацию об окружающем мире сам человек? Понятно, в его мозгу нет карты, отражающей всю Вселенную. Но есть некие объемные карты различных мест, которые он может представить в своем воображении. И есть некоторые схемы взаимного расположения мест. И, судя по всему, при хранении этих схем в памяти человека не всегда соблюдаются масштаб. Иными словами, карта реальности представлена в виде графа, некоторые куски которого детализированы с разной степенью детализации. Точно также сделаем и мы. Но опять возникает вопрос: а какой структурой реализовать граф? Есть несколько способов:
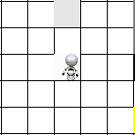
Какой из этих способов выбрать, это, прежде всего, зависит от задачи, которые робот будет решать. Поэтому, давайте сначала сформулируем что мы хотим получить на следующем шаге. Пусть это будет оптимизация алгоритма поиска еды с учетом препятствий. Например, робот будет составлять карту окрестности, в которой он сейчас находиться, на основании этой карты планировать свою траекторию перемещения. Пусть, например, размер его карты будет 5 на 5 (±2 в ту и в другую сторону от робота):
... .... Здесь у нас присутствует новый класс InnerModelingObject, его тоже создадим:
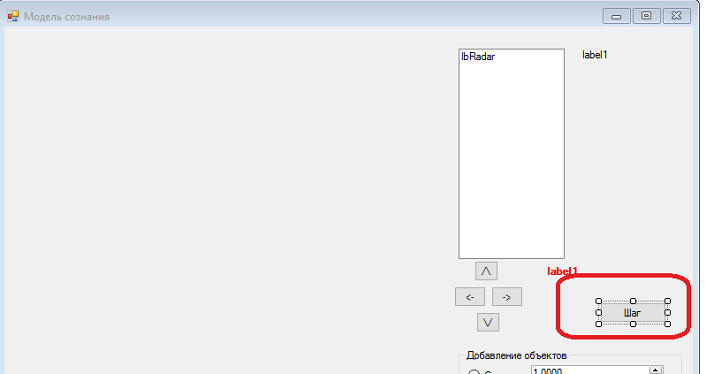
Для проверки создадим форму, которая покажет нам содержимое внутренней карты.... ... ... Теперь мы будем тестировать в пошаговом режиме, отключим обработку шагов в обработчике от таймера. Шаги буем смотреть, нажимая на соответствующую кнопочку:
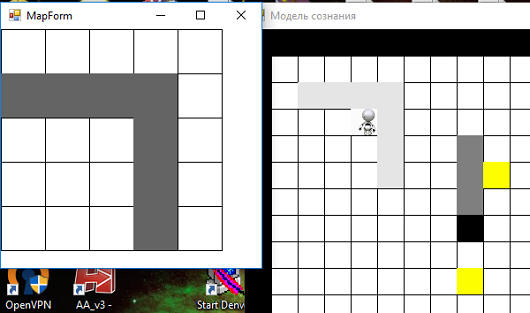
Проверим:
Попробуем поставить стенку:
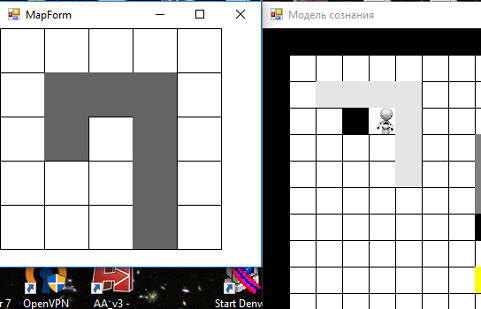
Как видим, карта соответствует тому, что робот реально "видит". То есть, мы учли тот факт, что одно препятствие закрывает другое. Или вот другой тест:.... Скриншоты, помеченные знаком *, являются цитатами и иллюстрациями программного продукта "Microsoft Visual Studio 2010 Professional", авторское право на который принадлежит корпорации Microsoft.. |
||
| Последнее обновление ( 21.06.2024 г. ) | ||
| Пред. » |
|---|


