




| Моделирование сознания. Урок 6. О целенаправленном поведении |

|

|
| Автор megabax | |
| 03.04.2024 г. | |
|
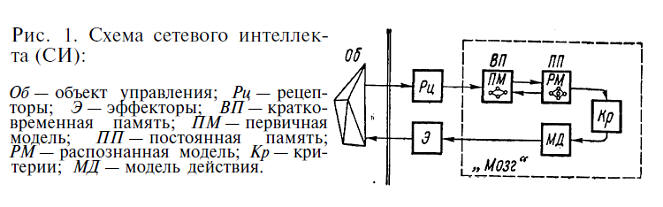
Моделирование сознания. Урок 6. О целенаправленном поведении Что бы смотреть урок полностью и скачать исходники, подпишитесь на платный раздел. В платном разделе статья находиться здесь. На прошлом уроке была произведена попытка добавить в модель сознания мотивации. Эта попытка оказалась неудачной, но, тем не менее, были сделаны кое какие выводы: нужно добавить в модель элементы "интеллектуального" целенаправленного поведения. Новую модель возьмем из книги академика УССР Н. М. Амасова "Алгоритмы разума", год издания 1979:
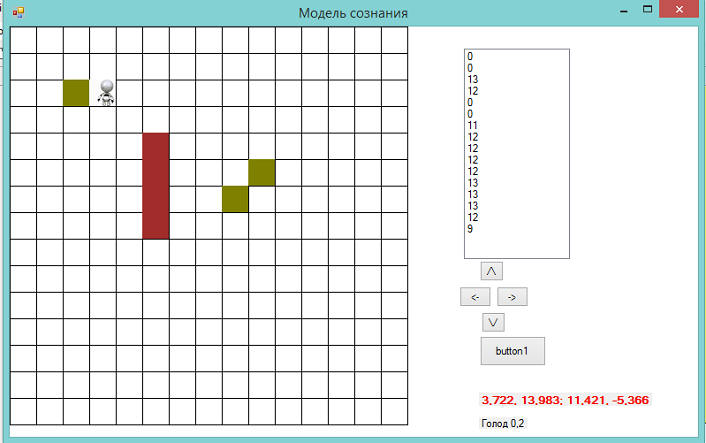
Расшифруем используемые в схеме понятия (с позиции модели разума, предложенной Амасовым). Объект управления (ОБ) ... ... Теоретически, теперь нейроны должны обучаться распознавать ситуации, когда будет "больно" а когда нет. Что бы это проверить, я сделал четыре кнопки для управления движением:
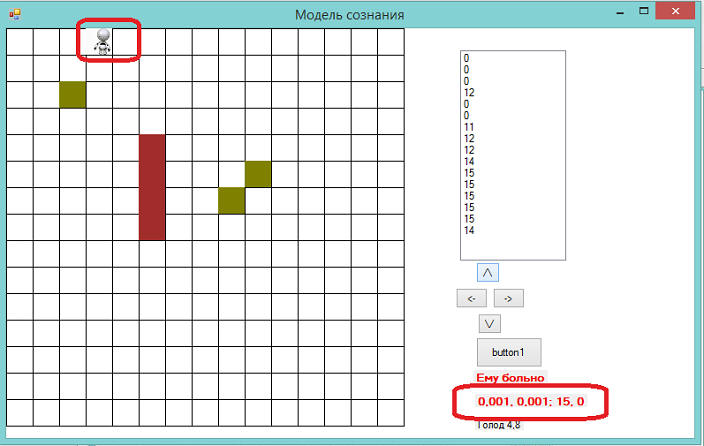
Если робот будет долго "долбиться головой об стену" то рано или поздно соответствующий нейрон выучит, что это больно:
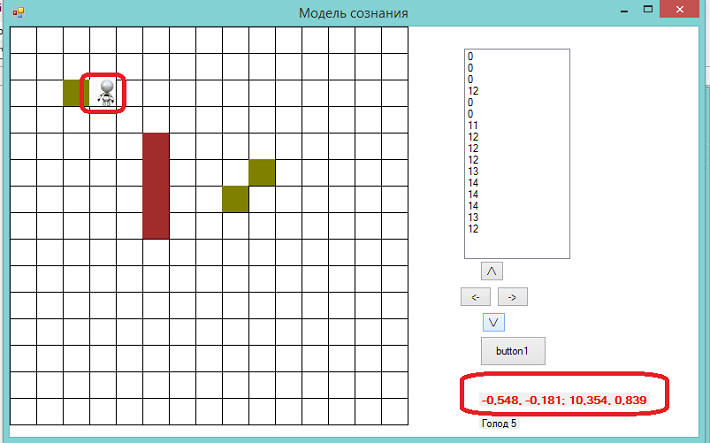
Но, стоит только роботу чуть чуть отойти от стенки, как нейрон тут же про это "забывает":
Таким образом, нужно сделать как то так, что бы робот мог в некой долговременной памяти хранить приобретенный опыт. Но это будет уже следующий шаг. |
|
| Последнее обновление ( 03.04.2024 г. ) |
| « След. | Пред. » |
|---|


