




| Моделирование сознания. Урок 4. Механизм обучения. |

|

|
| Автор megabax | |
| 27.03.2024 г. | |
|
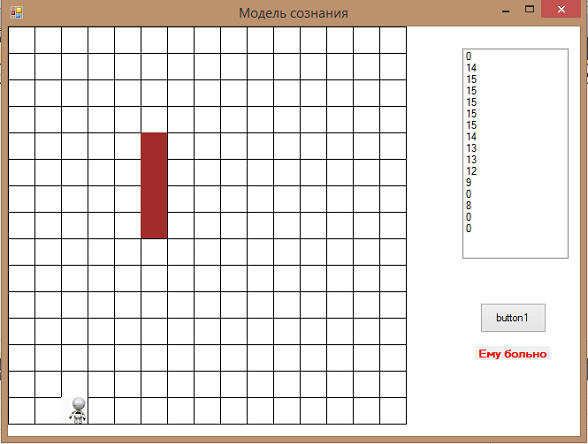
Моделирование сознания. Урок 4. Механизм обучения. Что бы смотреть урок полностью и скачать исходники, подпишитесь на платный раздел. В платном разделе статья находиться здесь. На прошлом уроке мы сделали нашему роботу мозг. А сейчас мы заставим его "включать мозг" - разработаем механизм обучения. Для этого нам потребуется еще один датчик - датчик боли, который срабатывает каждый раз, когда робот натыкается на препятствие. Любое живое существо обладает инстинктом самосохранения, который в примитивной реализации можно рассматривать как простое желание избежать боли. Наш робот будет избегать "неприятных ощущений" путем обучения. Сигнал боли у нас будет просто включать вызов процедуры корректировки весовых коэффициентов нейросети. Рецептор боли мы разместим в теле робота, класс Body ...
... ...
Что тут у нас получается? Сначала робот идет в случайном направлении. Потом натыкается на препятствие. После чего робот, как правило, меняет направление. Если потом наткнется на следующее препятствие, то тоже меняет направление. В конце концов, он либо останавливается, либо начинает двигаться по замкнутой траектории, не натыкаясь на препятствие. И это может продолжаться до бесконечности. Можно ли сказать, что наша модель обладает чем то вроде зачатков сознания? Разумеется, нет. Вряд ли кто то отважиться назвать живым существом робота, который завис и ходит кругами. Но как же тогда "оживить" нашу модель? Можно, например, добавить в нее чувство голода, которое будет стимулировать робота сойти с зацикленной траектории и устремиться на поиски "пищи". Но этим мы займемся на следующем уроке.
Скриншоты, помеченные знаком *, являются цитатами и иллюстрациями программного продукта "Microsoft Visual Studio 2010 Professional", авторское право на который принадлежит корпорации Microsoft.. |
|
| Последнее обновление ( 27.03.2024 г. ) |
| « След. | Пред. » |
|---|


