




| Моделирование сознания. Урок 2. У робота появляется сенсор. |

|

|
| Автор megabax | ||
| 19.03.2024 г. | ||
|
Моделирование сознания. Урок 2. У робота появляется сенсор. Что бы смотреть урок полностью, подпишитесь на платный раздел. В платном разделе статья находиться здесь. На прошлом уроке мы создали примитивную модель робота в виртуальной вселенной. Но робот у нас получился "слепой". Он не видит окружающую его реальность. Поэтому сейчас мы придумаем какой-нибудь сенсор. Например, что то типа радара, как у летучей мыши. Для этого создадим класс Radar...
...
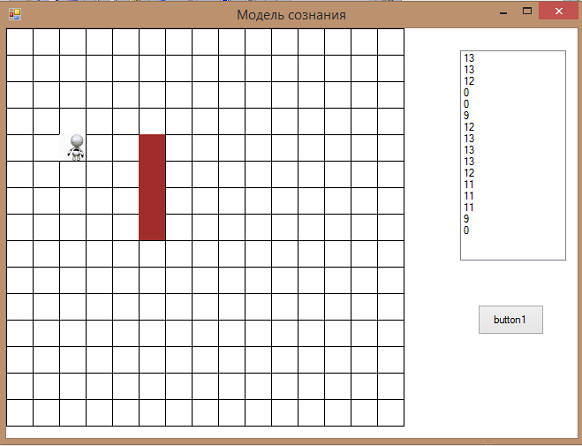
Добавим к главной форме список ListBox и соединим его с роботом:
Теперь можно тестировать:
|
||
| Последнее обновление ( 19.03.2024 г. ) | ||
| « След. | Пред. » |
|---|


