




| Моделирование систем. Урок 6. Еще один эксперимент с моделью пружинного маятника. |

|

|
| Автор megabax | |
| 04.01.2013 г. | |
Моделирование систем. Урок 6. Еще один эксперимент с моделью пружинного маятника.Что бы смотреть урок полностью, подпишитесь на платный раздел. В платном разделе статья находиться здесь. Исходники к уроку можно скачать в платном разделе. На прошлом уроке мы разобрали модель "Пружинный маятник". Сегодня проведем с этой моделью еще один эксперимент. Пусть к маятнику приложена внешняя сила Fp, котоая меняется по синусоидальному закону, а именно: Fp=A * sin (N * t + M) где A - амплитуда колебаний, N - коэффициент частоты, M - коэффициент сдвига по фазе, t - время, прошедшее с начала моделирования. Тогда текст модуля Pendulum.cs у нас будет выглядеть вот так... ... ...Так же немножко меняем форму программы:
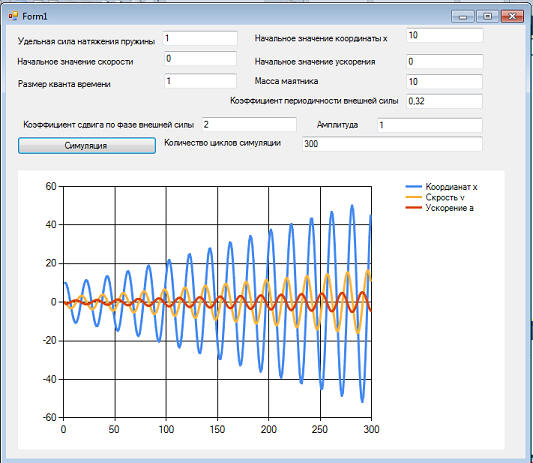
И обработчик нажатия на кнопочку "Симуляция"... ... ...В результате воздействия внешней силы, изменяющейся по синусоидальному закону, мы так же можем наблюдать явление резонанс:
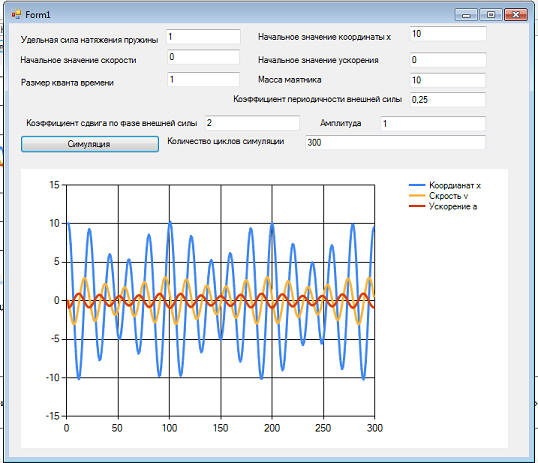
При несовпадении внешней частоты с резонансной мы наблюдаем лишь искаженные собственные колебания:
До сих пор мы рассматривали идеальные модели маятников. Но в реальности происходит так, что свободные собственные колебания маятника затухают, так как на него воздействует сила трения. Но такую модель мы разберем в будущих уроках.
Скриншоты, приведенные в данной статье, являются цитатами и иллюстрациями программного продукта "Microsoft Visual Studio 2010", авторское право на который принадлежит Microsoft.
|
|
| Последнее обновление ( 04.01.2013 г. ) |
| « След. |
|---|


